
Zukunftsbilder mit automatisierter Mobilität in Österreich
Entwicklungen auf dem Gebiet der automatisierten Mobilität werden unsere Mobilität und die Möglichkeiten des Vorankommens stark verändern. Im Forschungsprojekt „SAFiP – Systemszenarien automatisiertes Fahren in der Personenmobilität" wurden für Österreich mögliche Zukunftsbilder mit automatisierter Mobilität entwickelt und deren verkehrsrelevante Wirkungen abschätzt. Zusätzlich wurden darauf aufbauend Erfordernisse für verschiedene Politikfelder in Österreich erarbeitet und konkrete weiterführende Maßnahmen identifiziert.
Szenarien
In einem umfassenden Szenario-Prozess wurden unter Einbindung von StakeholderInnen und ExpertInnen im Bereich des automatisierten Verkehrs (AV) insgesamt drei alternative Zukunftsbilder über die potenziellen Auswirkungen automatisierter Mobilität in Österreich entwickelt. Mit den Zukunftsbildern werden alternative idealtypische Möglichkeiten künftiger automatisierter Mobilität in Österreich beschrieben, d.h. es sind zugespitzte Entwicklungen, die aber eher in Mischformen eintreten werden.
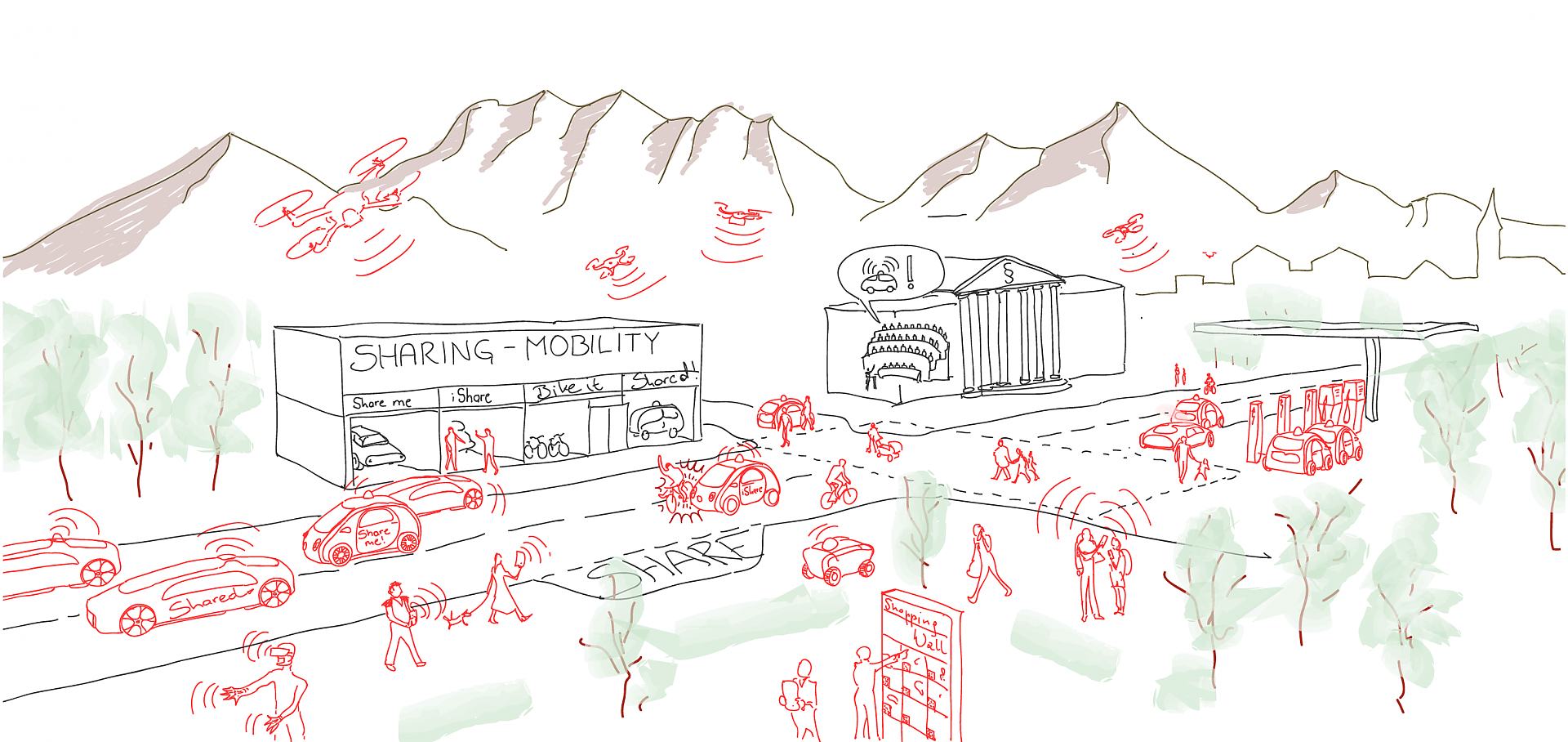
Szenario 1: "Markt-getriebene AV-Euphorie"
Mit dem Szenario „Markt-getriebene AV-Euphorie" wird vor dem Hintergrund einer eher auf Wettbewerbsfähigkeit und wirtschaftliche Entwicklung ausgerichteten Mobilitäts- und Verkehrspolitik sowie sehr starken Fortschritten der Automatisierungs-technologien und dem Sharing durch die Bevölkerung eine Verbreitung von automatisierten Car Sharing- und Leasing-Angeboten mit schwachen Schnittstellen zum öffentlichen Verkehr skizziert. Die Menschen in Österreich sind überwiegend mit hybriden Antrieben unterwegs.
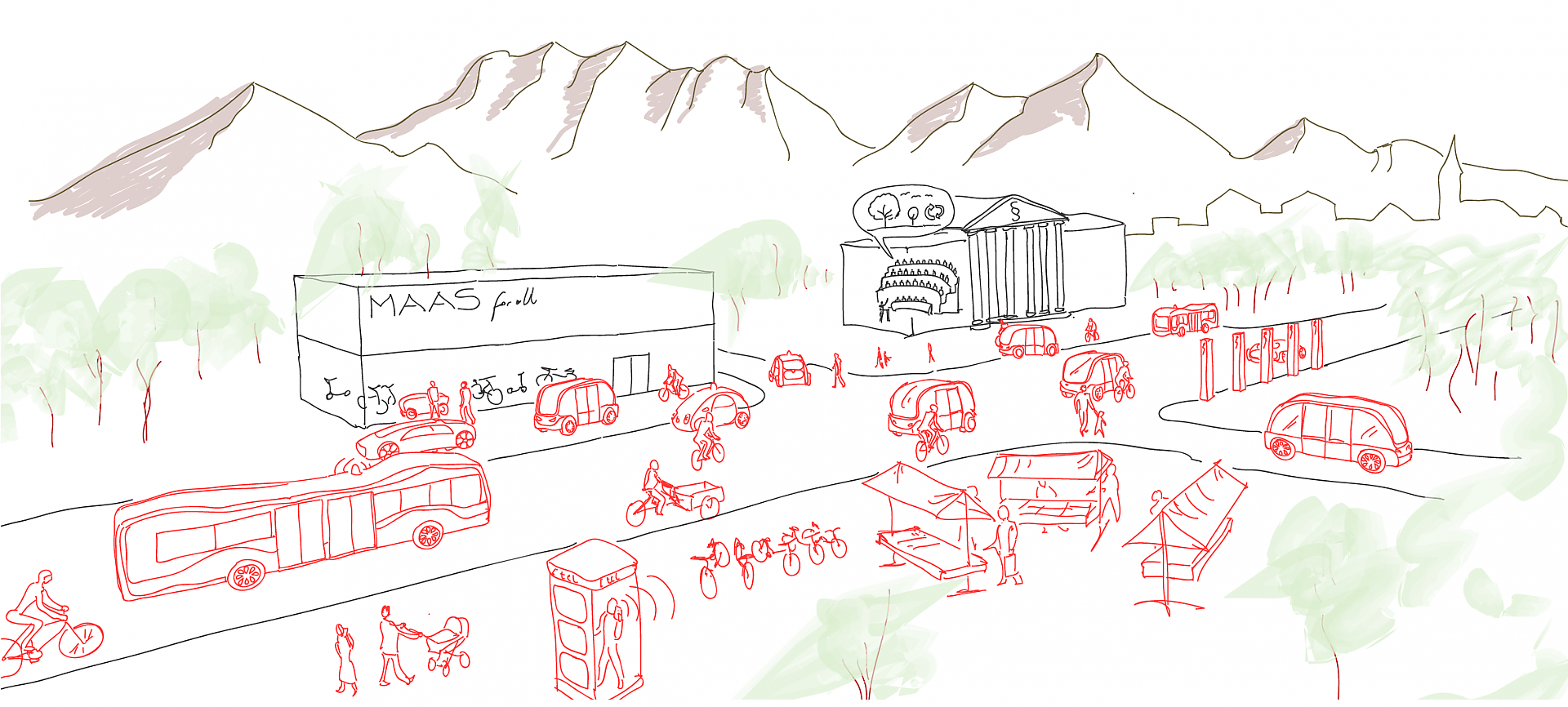
Szenario 2: „Politik-getriebene AV-Steuerung"
Im Szenario „Politik-getriebene AV-Steuerung" wird vor dem Hintergrund einer auf ökologische Nachhaltigkeit und soziale Inklusion ausgerichteten Mobilitäts- und Verkehrspolitik und der Anwendung von hochautomatisiertem Fahren in einfachen Anwendungskontexten eine weitgehende Verbreitung aller Formen von Sharing sowie eine bedeutende Rolle des öffentlichen Verkehrs und aktiver Mobilität in Österreich beschrieben. Diese Verkehrsangebote sind weitgehend in stadt-regionalen öffentlichen Mobilitäts-Angeboten (MaaS) integriert. E-Fahrzeuge sind aufgrund technologischer Fortschritte (kürzere Ladedauer, Ausweitung der Reichweite) und sinkenden Batteriepreisen weit verbreitet.
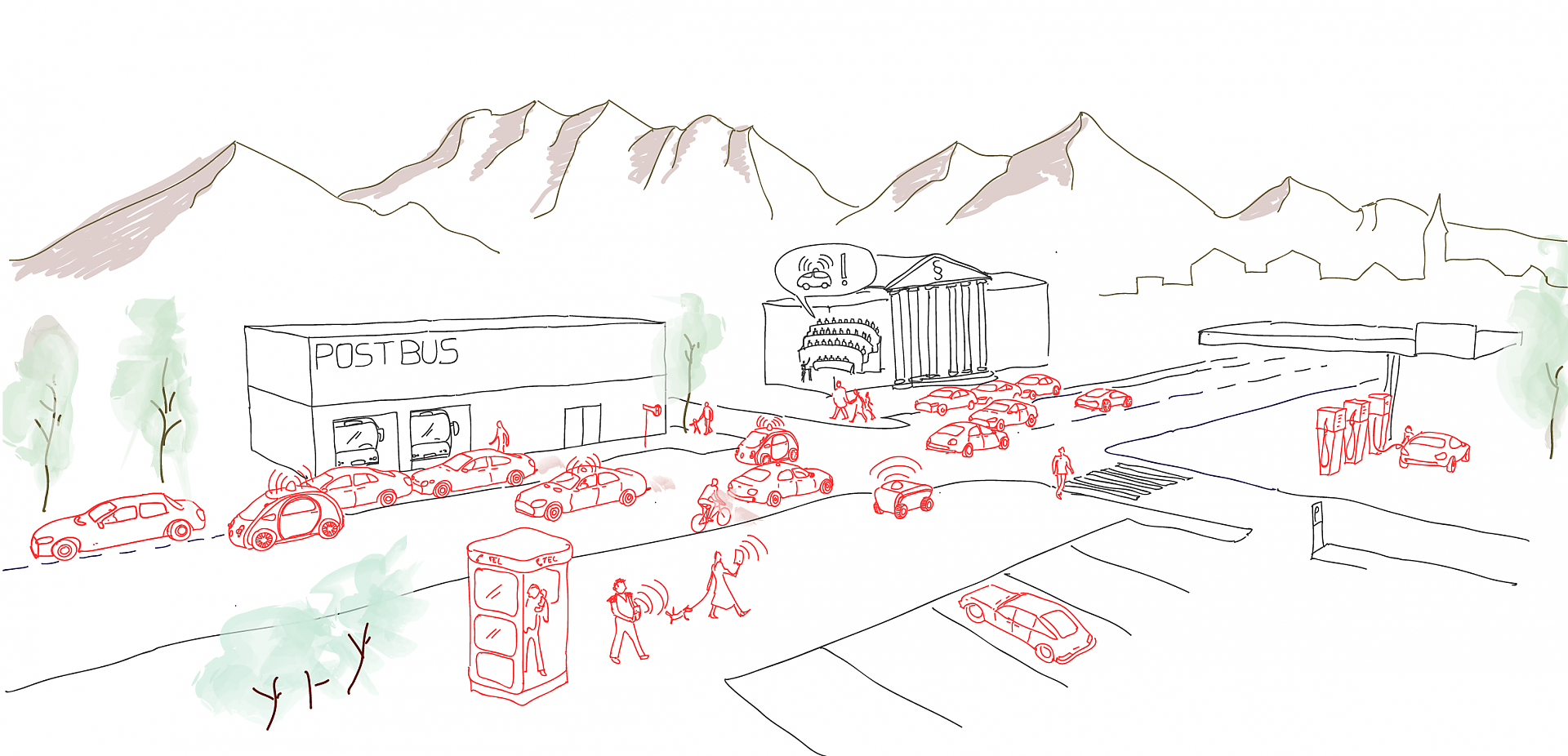
Szenario 3: "Individualisierte Mobilität und langsame AV-Entwicklung"
Im Szenario „Individualisierte Mobilität und langsame AV-Entwicklung" wird vor dem Hintergrund einer eher auf Wettbewerbsfähigkeit und wirtschaftliche Entwicklung ausgerichteten Mobilitäts- und Verkehrspolitik sowie nur geringen Fortschritten der Automatisierungstechnologien weiterhin eine Verbreitung des motorisierten Individualverkehrs (MIV) in Österreich angenommen, während öffentliche Verkehrsmittel oder Ride Sharing-Angebote sich kaum durchsetzen und als eher unsicher gelten. E-Fahrzeuge sind wenig attraktiv – vor allem durch geringe Reichweiten, eine weiterhin hohe Ladedauer und hohe Anschaffungskosten.
Wirkungen
Mit Hilfe eines Simulationsmodells (MARS - Metropolitan Actiity Relocation Simulator) wurden unter Berücksichtigung der Implementierung und Parametrisierung von Wirkungsketten die verkehrlichen Wirkungen der jeweiligen Zukunftsbilder mit automatisierter Mobilität für Österreich simuliert und abgeschätzt.
Aus den Simulationen zeigt sich, dass automatisierte Mobilität ohne geeignete verkehrspolitische Maßnahmen – dazu zählt beispielsweise Mobility Pricing – zu einer deutlichen Zunahme der gefahrenen Kilometer (Verkehrsaufwand) des motorisierten Individualverkehrs (MIV) führen wird. Im Gegenzug ergeben sich modale Verlagerungseffekte mit geringeren Verkehrsaufwänden beim öffentlichen Verkehr, dem Fußverkehr und dem Radverkehr.
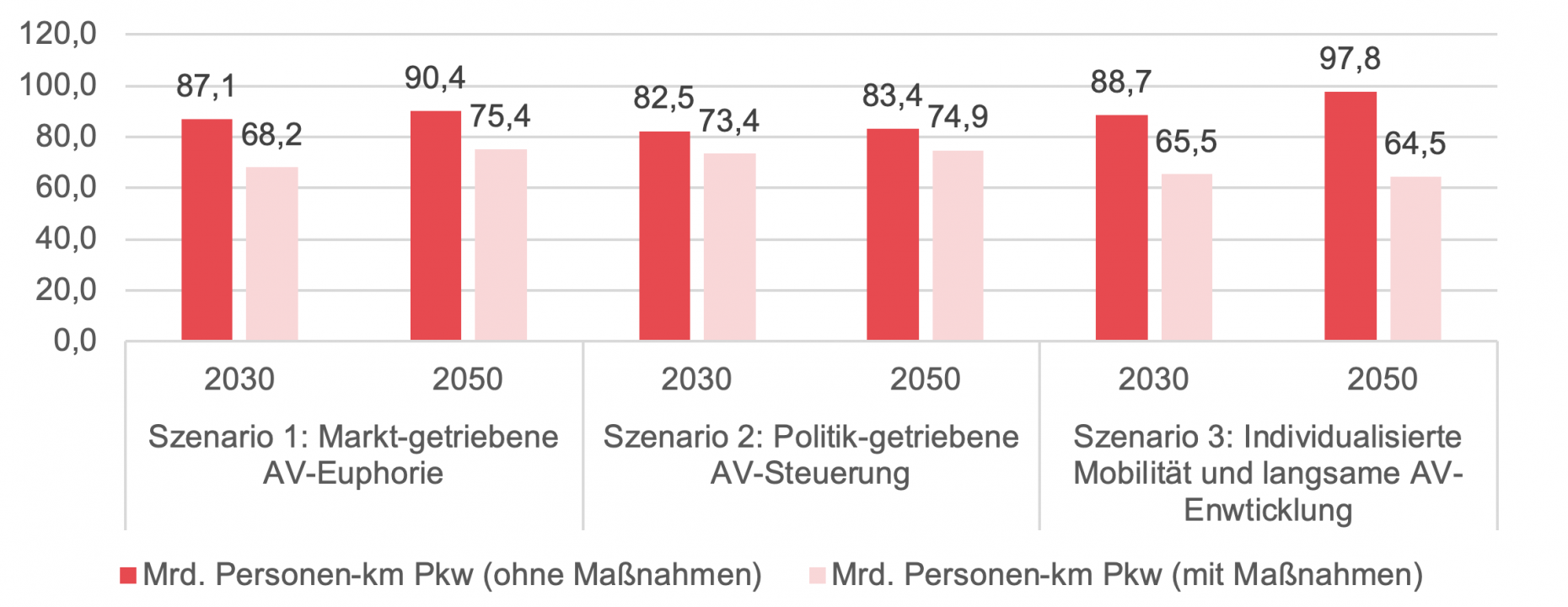
Vor allem für die Szenarien 1 „Markt-getriebene AV-Euphorie" und 3 „Individualisierte Mobilität und langsame AV-Entwicklung" ist unter anderem aufgrund der geringen Verbreitung des (AV-)Sharings der Pkw-Verkehrsaufwand deutlich höher. Im Szenario 2 „Politik-getriebene AV-Steuerung" werden durch den Einsatz eines verstärkten ÖV-basierten AV hingegen eher positive Effekte erkennbar. Wird der ÖV-basierte AV und zusätzlich ein Mobility Pricing auch in den anderen Szenarien eingesetzt bzw. eingeführt – werden also zusätzliche Maßnahmen gesetzt –, kann der Zunahme des Verkehrsaufwandes im motorisierten Individualverkehr hingegen deutlich entgegengewirkt werden.
Entwicklung des Pkw-Verkehrsaufwands in den Szenarien
Überdies wird aus den Simulationen ersichtlich, dass ohne eine Verknüpfung der automatisierten Fahrzeuge mit post-fossilen Antriebssystemen auch die Emission von Schadstoffen zunehmen wird.
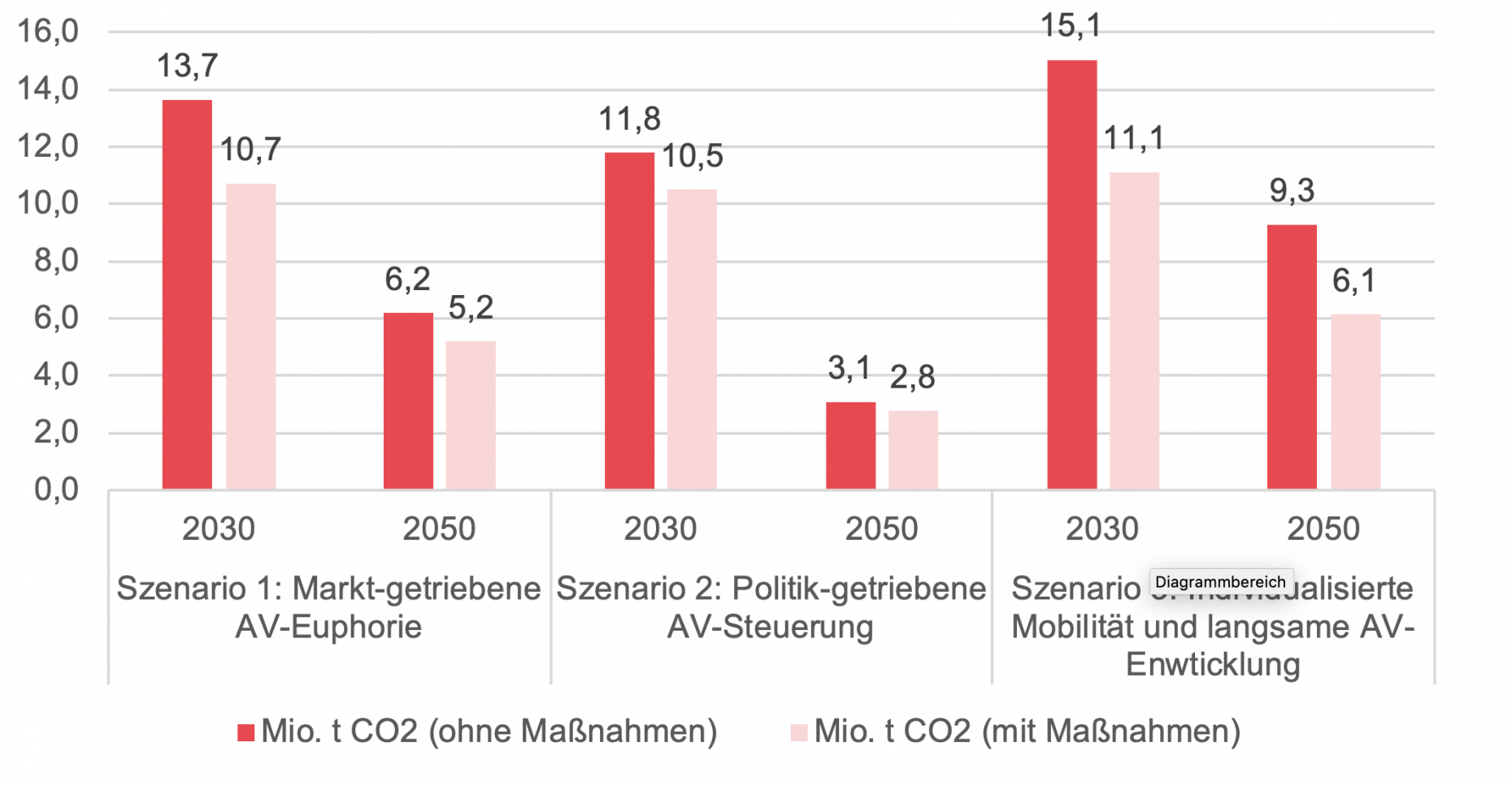
Während vor allem im Szenario 2 „Politik-getriebene AV-Steuerung" durch die weite Verbreitung von elektrischen Antrieben die CO2-Emissionen relativ gering sind, zeigen sich speziell für das Szenario 3 „Individualisierte Mobilität und langsame AV-Entwicklung", in welchem E-Fahrzeuge wenig attraktiv sind, deutlich höhere Werte. Auch hier können die CO2-Emissionen durch zusätzliche Maßnahmen wie beispielsweise die Einführung eines Mobility Pricings bzw. den Einsatz eines verstärkten ÖV-basierten automatisierten Verkehrs deutlich reduziert werden.
Entwicklung der direkten und indirekten Treibhausgasemissionen in den Szenarien
Handlungserfordernisse und -empfehlungen
Die Szenarien und die Abschätzung ihrer verkehrlichen Wirkungen haben ein großes Potenzial dafür, den gesellschaftlichen und politischen Diskurs zur automatisierten Mobilität zu erweitern und zu versachlichen. Mit ihnen kann deutlich gemacht werden, dass sich mit der automatisierten Mobilität durchwegs neue Chancen zur nachhaltigen Gestaltung des Verkehrssystems und der Mobilität ergeben: Eine verbesserte Verkehrssicherheit, erweiterte Mobilitätsoptionen für spezifische soziale Gruppen (z.B. Mobilitätseingeschränkte), eine höhere Kapazitätsausnutzung der vorhandenen Verkehrsinfrastrukturen und/oder eine verbesserte Wirtschaftlichkeit des ÖV, falls die Personalkosten verringert werden können, sind nur einige der positiven Aspekte. Um diese Vorteile absichern zu können, bedarf es aber einer rechtzeitigen, gut koordinierten und pro-aktiven Steuerung von Politik und planender Verwaltung auf allen Ebenen und unter Einbeziehung wichtiger gesellschaftlicher AkteurInnen.
Sind die verbindlichen österreichischen Klima-, Energie- und Umweltziele der Ausgangspunkt, dann zeigen die simulierten verkehrsrelevanten Wirkungen zu den Zukunftsbildern, dass nur dann positive Wirkungen durch die automatisierte Mobilität zu erwarten sind, wenn konsequente verkehrspolitische Steuerungsstrategien ergriffen werden, um unerwünschte Nebeneffekte weitgehend zu vermeiden.
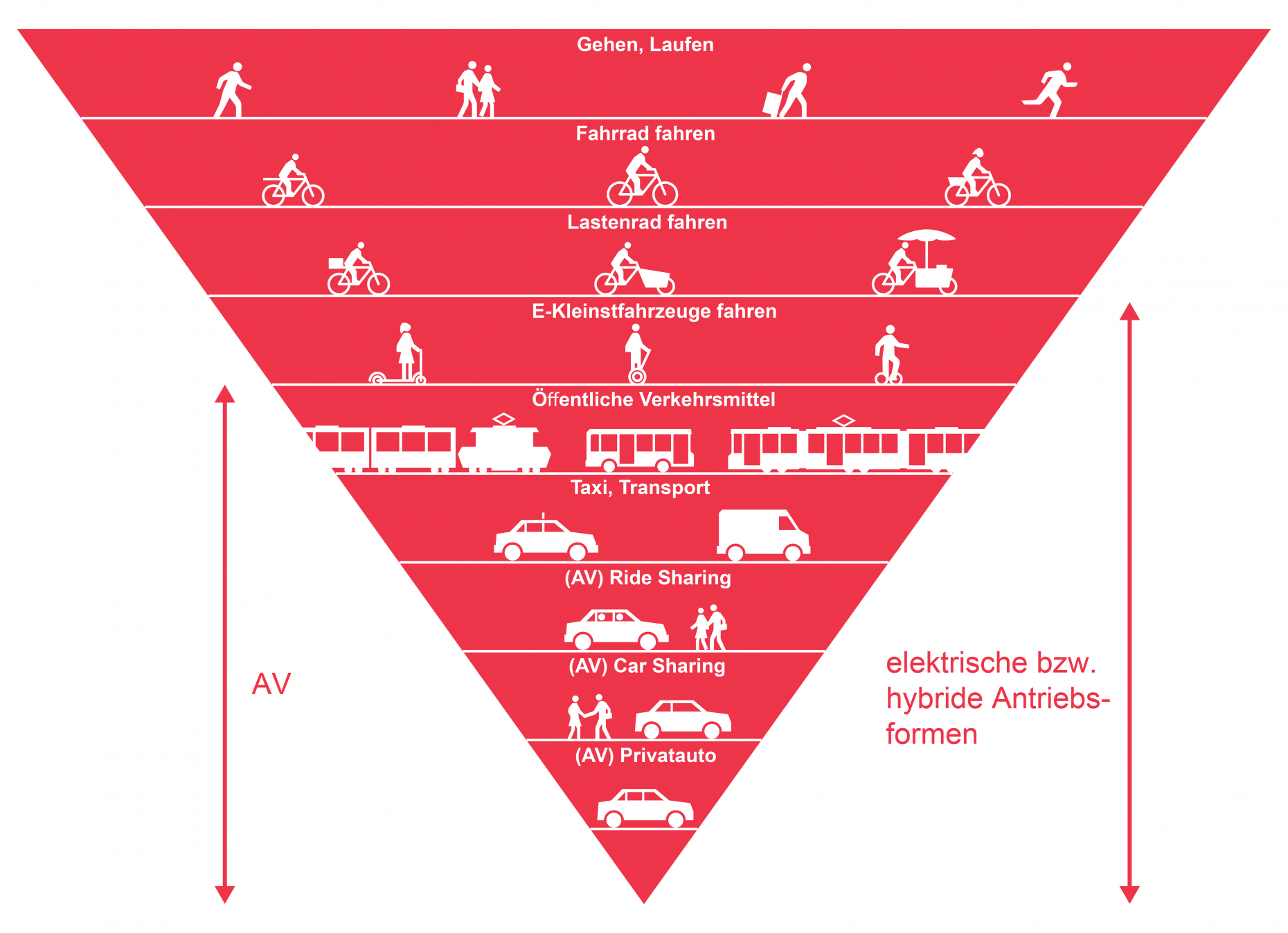
Zudem ist es notwendig, die Verkehrsmittelwahl der Bevölkerung im Sinne einer klaren Prio-risierung (Verkehrspyramide) so zu beeinflussen, dass:
- die aktive Mobilität des Zufußgehens, Radfahrens im Sinne der Mobilitäts-Suffizienz an erster Stelle steht,
- ein attraktiver ÖV (S-Bahn, U-Bahn, Schnellbusse, Regionalverkehr) optimiert durch AV und stark vernetzt mit anderen Modi ein wesentliches Rückgrat des Verkehrs-angebots bildet,
- bereits in der Relevanz abgestuft die Potenziale des AV-Ride Sharing mit den erhöhten Besetzungsgraden genutzt werden und
- dann erst mit geringerem Stellenwert AV-Car Sharing aufgrund des positiven Flächen-effekts (Wegfall von Parkplätzen, Autohäusern etc.) forciert wird.
- Demgegenüber ist die Steigerung des Verkehrsaufwands, die beim privaten AV zu erwarten ist, so groß, dass dessen Priorität am niedrigsten sein sollte.
Verkehrspyramide mit Automatisiertem Verkehr (AV)
Zu den möglichen AV-spezifischen steuernden Maßnahmen zählen vor allem Maßnahmen des Mobility Pricings, wie beispielsweise eine gewichtsbasierte Besteuerung von AV-Fahrzeugen mit konventionellem Antrieb bzw. eine Besteuerung nach Bauart (wenn passive Sicherheit nicht mehr im großem Ausmaß benötigt wird) oder differenzierte Straßenbenutzungsgebühren je nach Zeit, Störwirkung, Ort, Besetzungsgrad etc. und Abgaben auf Leerfahrten von automatisierten Fahrzeugen.
Zudem ergeben sich durch die Möglichkeit einer langen Zeit des Übergangs im Mischverkehr verschiedene Herausforderungen, wie
- eine Verschlechterung der Verkehrssicherheit durch geringe Erfahrungen der BürgerInnen mit der automatisierten Mobilität oder Konflikte zwischen Fahrzeugen unterschiedlicher Automatisierungsstufen resp. mit anderen Verkehrsteilnehmenden,
- eine Veränderung der Lagegunst von Standorten, je nachdem, ob und wie gut diese für AV erreichbar sind, und
- hohe finanzielle Ausgaben für die Bereitstellung und Instandhaltung von AV-Infrastruktur, gepaart mit sinkenden Einnahmen für die öffentliche Hand durch wegfallende Einnahmen wie Parkgebühren.
Mögliche Maßnahmen für die Mischverkehrsphase sind beispielsweise Geschwindigkeitsreduktionen für alle Kfz zur Verbesserung der Verkehrssicherheit, eine Steuerung der Siedlungsentwicklung über Boden- (z.B. Flächenwidmung) und Finanzpolitik (Pendlerpauschale, Eigenheimförderung) sowie stadtregionale Kooperationen, um Lagegunst-Effekte auszugleichen oder der Einsatz neuer Finanzierungsinstrumente, die sich sehr stark am Verursacherprinzip orientieren.
Überdies wurde durch die Szenarien deutlich, dass das Zusammenwirken unterschiedlicher technologischer, kultureller, ökonomischer und institutioneller Faktoren besonders wichtig ist. Die Komplexität bei der automatisierten Mobilität erfordert ein schrittweises Vorgehen des Ausprobierens in Experimentierräumen, wie sie in Österreich mit den urbanen Mobilitätslaboren sowie speziell auch den Testumgebungen (Innovationslabore) für automatisiertes Fahren zu Verfügung stehen. Durch transdisziplinäre Lernprozesse können die Ziele der österreichischen Strategie zur automatisierten Mobilität unterstützt und der Wirtschaftsstandort gestärkt werden.